Einen Ball fangen
Schuss. Der Ball kommt, der Torwart springt, reißt die Arme hoch und hat den Ball sicher in den Händen. Ganz einfach.
Bauen wir doch in Gedanken einmal einen Roboter, der das kann. Dazu müssen wir einiges wissen.
1. Sir Isaac Newton hat es herausgefunden. Der Ball fliegt mit einer Anfangsgeschwindigkeit los, wir nennen sie v0 . Wenn nichts weiter passiert, fliegt er in der Anfangsrichtung immer mit gleicher Geschwindigkeit weiter. Nennen wir die Strecke einmal s und die Zeit t. Dann gilt s = v0 * t. Das heißt nichts anderes, als dass er nach t Sekunden s Meter vom Schützen entfernt ist.
Für unseren Roboter benötigen wir die Flugkurve. Einen Punkt im Raum, nennen wir ihn p, kann man mit drei Koordinaten eindeutig bestimmen.
Zum Beispiel Höhe, Breite, Tiefe, das kennen Sie sicher schon.
Eine kleine Vereinbarung: f soll für irgendeinen mathematischen Ausdruck stehen. In Klammern setzen wir die Werte, die für
diese Funktion wichtig sind. In unserem Falle wäre das also: p(t) = f(v0 , t).
Das heißt nichts anderes, als dass die Lage des Balls zum Zeitpunkt t von einer Formel abhängt,
in der die Anfangsgeschwindigkeit und die Zeit vorkommen.
f(v0 , t) steht also im Augenblick
für
p(t) = f(v0 , t) = v0 * t.
2. Nun, der Ball ist aber nicht im kräftfreien Raum. Die Schwerkraft wirkt und zieht den Ball nach unten auf die Erde. Schon wieder war es
Newton, der die Sache mathematisch beschrieben hat (auch schon Galilei übrigens):Es gibt einen Faktor, die sogenannte Erdbeschleunigung, g genant,
der im überschaubaren Bereich konstant ist. Die Geschwindigkeit nach unten, der freie Fall genannt, wird mit der Zeit immer größer: vu = g * t.
Genug der mathematischen Formeln. Fest steht nun, dass unser Punkt p (der Ball) nach einer Formel berechnet werden kann, die auch noch von der Erdbeschleunigung
abhängt:
p(t) = f(v0 ,g, t)
3. Es ist leder noch komplizierter. Hier auf der Erde bewegen wir uns in der Luft. Und die setzt dem Ball Widerstand entgegen. Sie bremst ihn ab.
Das tut sie in Abhängigkeit von der Geschwindigkeit des Balls und der Fläche, die er der Luft entgegenstellt. Dabei ist die Form von großer Bedeutung.
Für jede Form kann man das berechnen. Wir nennen diesen Faktor für den Ball cw. Übrigens, der Widerstand hängt mit dem Quadrat der Geschwindigkeit zusammen.
Er wird also deutlich weniger, wenn der Ball langsamer druch diesen Widerstand langsamer wird.
Mit ordentlich Mathematik, die wir hier weglassen, bekommen wir eine Formel, die von folgenden Faktoren abhängt:
p(t) = f(v0 ,g, cw, t)
Die Formel dazu nennt isch übrigens ballistische Kurve. Mit ihr kann man ziemlich genau sagen, wo ein Ball die Erde trifft, zum Beispiel.
4. Nicht ganz, leider. Denn da ist noch der Wind. Der hat eine Richtung und einen Wert. Wie beim Wetterbericht: Wind aus NO mit 4 Beaufort zum Beispiel.
Dieser Wind bremst oder beschleunigt unseren Ball oder bringt ihn aus der Bahn. Vorausgesetzt wir kennen den Wind und vorausgesetzt, er bläst auf der gesamten Flugbahn gleich, dann können wir alles berechnen und erhalten mit wr für Windrichtung und -stärke
eine ziemlich komplizierte Formel mit folgenden Variablen und Konstanten:
p(t) = f(v0 ,g, cw, wr, t)
5. Leider immer noch nicht alles. Der Schütze ist schlau und geübt. Er versetzt dem Ball einen Drall. Die Auswirkungen auf die
Flugbahn sind ziemlich komplex. Wir werden sie hier nicht im einzelnen ausführen. Nennen wir die Einflussfaktoren einmal dr für Drall.
Damit erweitert sich unsere Formel noch einmal:
p(t) = f(v0 ,g, cw, wr, dr, t)
Nun ist aber genug. Mir würde schon noch etwas einfallen: Die Unwucht des Balles selbst aufgrund von Fertigungsungenauigkeiten. Aber lassen wir das.
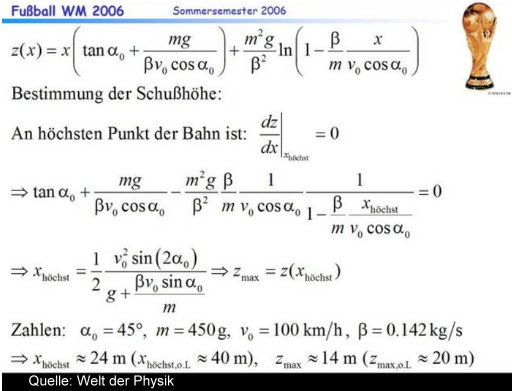
Ein kurzer Blick auf solche Formeln, entnommen aus der Welt der Physik:
6. Leider kennen wir jetzt erst einmal nur theoretisch die Flugbahn. Unser Roboter muss sie erst einmal erkennen. Da gibt es zwei Möglichkeiten: Wir füttern ihn von außen mit allen wichtigen Daten, ganz schnell und ganz aktuell oder er errechnet sich die Bahn aus der Beobachtung. Dazu müsste er den Ball in gewissen kurzen Abständen sehen, dazu muss er ihn auch im Gesamtbild erkennen und dann auch noch ausrechnen, wie er fliegt. Klingt recht kompliziert und ist es auch.
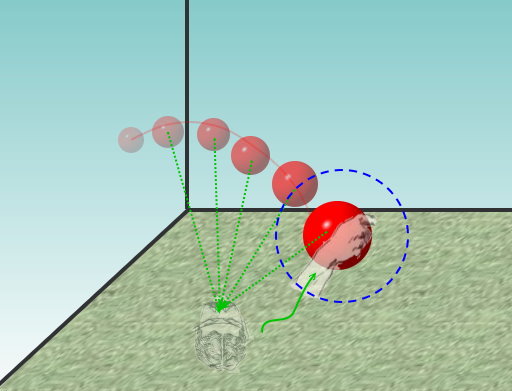
7. Angenommen, er kennt jetzt die Bahn. Dann kann er sich über das Fangen Gedanken machen. Dazu muss er die Reichweite seines Armes
kennen und dann den Ball fangen, wenn er innerhalb dieser Reichweite ist. Dass er dazu eine Menge Gelenke und Motoren in Bewegung setzen muss, ist schon
klar. Aber das Hauptproblem dabei ist - die Zeit. Es nützt ja nichts, die Hand an der richtigen Stelle zu haben, wenn der Ball schon druch ist.
Nennen wir die Bewegungsbahn des Roboters m wie move. Dann muss gelten:
m(diverse Faktoren, t) = f(v0 ,g, cw, wr, dr, t)
Wir müssen also den Zeitpunkt herausrechnen, zu dem diese Gleichtheit gilt. Ufff!!!
8. Bei all dem fällt mir etwas auf: Wie konnten die Menschen vor Newton und vor die Mathematik überhaupt bekannt war,
einen Ball fangen? Sie kannten doch all diese Formeln gar nicht. Und noch mehr: Wie schafft es ein Greifvogel in der Luft etwas zum Essen
zu erwischen oder wie kann mein Alex mit perfekter Sicherheit einen Schneeball fangen? Er kennt bestimmt keine Mthematik. Also von mir nicht.